Руководитель темы Коковин Валерий Аркадьевич, к.т.н., ученое звание доцент, доцент кафедры автоматизации технологических процессов и производств, заведующий комплексной лабораторией филиала.
Развитие современного производства электронных средств и связанных с ним технологиями ставит перед разработчиками задачи по интеллектуализации оборудования. Для повышения эффективности производства разработана концепция Industry 4.0 (The Fourth Industrial Revolution). Развитие микроэлектроники и информационных технологий позволило создать миниатюрные вычислители с малым потреблением и высокой производительностью, которые могут быть встроены не только в роботизированные системы, но и в отдельные элементы этих систем. Данное качество дает возможность создавать интеллектуальные подсистемы IoRT (Internet of Robotic Things), обладающие способностью к сетевому взаимодействию между собой и с другими системами.
В технологических системах производства электронных средств ответственное место занимают силовые преобразователи PEC (Power Electronic Converter). РЕС используются в составе управляющих приводов систем позиционирования, в формирователях мощных гармонических сигналов для ультразвуковых систем очистки поверхности печатных плат и в многих других приложениях.
В промышленных силовых установках (например, ультразвуковая обработка) часто необходимо поддерживать питающее напряжение на определенном уровне с возможностью регулировки. При этом форма питающего напряжения не должна искажаться. Решение этой задачи может быть реализовано с применением силового преобразователя, в основе которого используется резонансный усилитель (РУ). В технической литературе известны примеры создания и применения электротехнических усилителей напряжения и мощности. Одним из примеров такого усилителя является резонансный усилитель, построенный на основе трансформатора, первичная цепь которого введена в режим резонанса токов путем параллельного соединения конденсатора и первичной обмотки [1]. Однако реализация данного РУ затрудняется сложностью изготовления магнитопровода и настройки.
В статьях [2,3] рассмотрен эффект усиления входного напряжения и мощности на выходе РУ, причем величина выходного напряжения может быть во много раз больше питающего. Для объяснения этого эффекта проведено компьютерное моделирование схемы замещения РУ.
Компьютерное моделирование работы силового преобразователя
В статье [4] анализируется математическая модель схемы силового преобразователя PEC с выходным высокочастотным синусоидальным напряжением для питания пьезоэлектрических излучателей. Эти излучатели могут быть использованы в различных технологических установках. При создании такой модели было учтено два условия: во первых - реальные свойства всех компонентов схемы PEC, во - вторых особенности работы колебательного контура в резонансном режиме PEC и нагрузки.
При создании математической модели для выполнения первого условия были выбраны реальные мощные силовые ключи, а именно полевые MOSFET - транзисторы, а не их виртуальные модели. Кроме того, были учтены значения величин паразитных сопротивлений и индуктивностей источника питания, дросселя и выходного трансформатора. Выполнение второго условия позволяет оценить качество синусоиды выходного напряжения PEC, а также получить расчетные формулы для определения параметров силовых реактивных элементов - дросселя и конденсатора колебательного контура.
Проведенные на ЭВМ исследования предложенной модели показали, что существуют определенные трудности при расчете даже схемы замещения PEC рассматриваемого типа из-за нелинейности происходящих в нем процессов при переменной нагрузке. В предложенной работе показаны два пути преодоления таких проблем с использованием компьютерного моделирования и приведен пример расчета схемы PEC для питания мощного пьезоэлектрического излучателя в режиме резонанса.
В общем случае силовой преобразователь состоит из источника переменного напряжения (промышленная сеть) и выпрямителя со сглаживающим фильтром. Для получения переменного напряжения с частотой отличной от частоты промышленной сети, необходимо использовать инвертор (транзисторный или тиристорный). Как правило, современные PEC средней мощности выполняются на транзисторах. При такой конфигурации PEC, в нагрузке при перекрестной коммутации двух пар транзисторов, протекает переменный и прямоугольный по форме ток, равный
Jн = E/ Rн, где E - напряжение источника питания, Rн - сопротивление нагрузки. Для правильного функционирования схемы необходимо выполнение следующих двух условий:
Jкл < Jдоп. (1)
tвкл < T/2 (2),
где Jкл – ток через ключ, Jдоп. – максимальный допустимый ток через транзистор, tвкл -включенное состояние транзистора, T - период отпирания двух пар транзисторов.
Для получения на выходе PEC синусоидального напряжения необходимо дополнительно включить фильтр первой гармоники прямоугольного напряжения. Он представляет собой последовательный (или последовательно- параллельный) колебательный контур LC, настроенный в резонанс с первой гармоникой выходного напряжения. Для выбора величин индуктивности дросселя L и емкости конденсатора C можно воспользоваться известными соотношениями [1], приведенными ниже. Условие резонанса в цепи с колебательным контуром:
ω20LC = 1 (3)
где L и C - параметры колебательного контура, ω0 = 2πf0 - круговая частота выходного напряжения, f0 - частота требуемых колебаний рабочего органа технологической установки. f0 = 1/ T0 = 1/ 2tи, где tи - длительность импульса тока через транзистор, T0 - период выходного синусоидального напряжения PEC. В этом случае можно записать:
tи< 1/π(LC) (4)
Из выражения (4) можно определить один из двух параметров колебательного контура (L или C). Для определения другого параметра воспользуемся выражением для волнового сопротивления контура:
Zв = (L/C) (5)
Для нахождения величины L и C примем допущения, что
Rн = 1/ ω0C =ω0L=Zв (6)
Проверим правильность такого выбора с помощью исследования схемы замещения транзисторного генератора (рис.1), входящего в состав PEC, методом моделирования на ЭВМ. Схема содержит источник питания V1 с внутренними параметрами (сопротивлением R1 и индуктивностью L1), конденсатор фильтра С1, четыре мощных силовых транзистора (MOSFET) M1-M4 с цепями управления V2-V5 и резисторами R2-R5, цепь нагрузки, состоящую из колебательного контура (дроссель L3, резистор R8 и конденсатор C2) и выходного согласующего трансформатораTX1. Первичная обмотка трансформатора подключена к резонансному конденсатору С2 через индуктивность рассеивания L2 и активное сопротивление R6. Нагрузка Rн(в схеме на рис.1 обозначена как R9) подключена к его вторичной обмотке с тем, чтобы получить необходимую величину напряжения. Резистор R7 гальванически связывает нагрузочный контур с общей точкой исследуемой схемы. Такая схема позволяет работать PEC в условиях большого диапазона изменения сопротивления нагрузки [5].
Руководитель темы Сасов Анатолий Михайлович, кандидат технических наук, доцент кафедры автоматизации технологических процессов и производств
Основу современной индустрии, составляет автоматическое технологическое оборудование для обработки материалов. Структурно, автоматическое устройство состоит из механической части, компьютера и датчиков, которые осуществляют обратные связи между исполнительными механизмами и системой управления. От качества и количества информации, поступающей от датчиков в систему управления оборудованием, зависит производительность и качество изготавливаемой продукции.
В современной промышленности нет ни одной отрасли, в которой не использовались бы сыпучие материалы. Это, прежде всего, целое направление в машиностроении – порошковая металлургия. А также, военная промышленность, электроника, фармацевтика, пищевая промышленность и пр. пр. Для получения качественной продукции, необходимо с высокой точностью загружать определенное количество порошка в штамп. В машиностроении - металлических порошков, порох - в патроны стрелкового оружия, в пищевой промышленности - соль, сахар и пр.
Для каждого вида изделий используют порошки из соответствующих материалов.
Свойства этих порошков – удельная и насыпная плотность, размер и форма частиц, существенно влияют на ход загрузки штампа, которая осуществляется вибрационными загрузочными устройствами (ВБЗУ). Поэтому номенклатура расходомеров непрерывно расширяется. Как следствие, совершенствуются и датчики, которые должны преобразовать механические колебания бункера в электрический сигнал, удобный для дальнейшей обработки в устройствах автоматизации.
В статье Сасов А.М. Расходомеры для автоматизации бункерных загрузочных устройств. Известия Тульского государственного университета. Технические науки, № 10, 2020. – С. 483 – 488. (ВАК, РИНЦ) [1], выполнен анализ средств автоматизации ВБЗУ. Установлено, что, во-первых, непланомерное использование новых разработок, в этой области, не дает ожидаемого положительного эффекта. Во-вторых, в конструкции этих средств, есть потенциальный ресурс для совершенствования. Поэтому, из серии расходомеров были выбраны конструкции, которые хорошо согласовываются с управляемыми генераторами импульсов в автоматизированных ВБЗУ.
Схема такого расходомера сыпучих материалов, с амплитудной модуляцией, приведена на рис. 1.
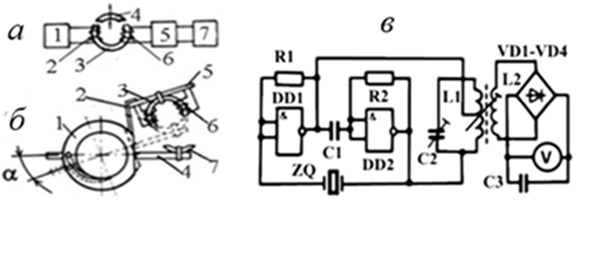
Рис. 1. Расходомер сыпучих материалов с амплитудной модуляцией
Патент RU: № 2100782: Расходомер сыпучих материалов: С1. 6 G01F 3/12. № 93008843: опубл. 27.12.1997. Бюл. № 36 / А.М. Сасов [2]. Расходомер содержит, высокочастотный генератор 1, С-образный разомкнутый магнитопровод 3, первичную обмотку 2 и вторичную 6, якорь магнитопровода 4, амплитудный детектор 5, измеритель
напряжения 7. Расходомер работает в составе типового ВБЗУ, рис. 2 б. На бункере 1 закреплена штанга 4 с якорем магнитопровода 7. С-образный магнитопровод 3 установлен на диэлектрической плате 5, которая посредством кронштейна 2 закреплена на основании ВБЗУ.
Генератор собран на микросхеме DD – два логических элемента И-НЕ, с использованием кварцевого резонатора. Амплитудный детектор собран по мостовой схеме из диодов. В одну диагональ включена вторичная обмотка, а ко второй диагонали подключен измерительный прибор, шкала которого проградуирована в единицах скорости расхода сыпучего материала.
Принцип работы. Во вторичной обмотке магнитопровода, индуцируется переменное напряжение, частота которого соответствует частоте генератора. В результате вибрации бункера, изменяется расстояние между полюсами С-образного магнитопровода и якорем, замыкающим магнитный поток магнитопровода. Амплитуда индуцируемого напряжения, зависит от плотности магнитного потока, который, в свою очередь, изменяется согласно изменению расстояния между якорем и полюсами магнитопровода. Так происходит амплитудная модуляция высокочастотного сигнала, поступающего от генератора.
Напряжение вторичной обмотки подается на амплитудный детектор, в котором происходит выделение низкочастотной составляющей. Ее величина пропорциональна величине механических колебаний бункера. Для визуального контроля скорости выдачи сыпучего материала из бункера, можно подключить измерительный прибор. Расходомер легко встраивается в системы автоматического управления.
Управляемые генераторы импульсов являются важной составляющей систем автоматики. К ним предъявляются жесткие требования. Это помехоустойчивость, широкий диапазон частот генерируемых импульсов, возможность управления частотой генератора в процессе функционирования устройства, частью которого он является. Кроме этого, доступность дистанционного управления режимом работы генератора, возможность управления частотой генерируемых импульсов одновременно несколькими управляющими объектами. Генератор импульсов, отвечающий этим требованиям, разработан на основе электронно-оптической системы. Патент RU № 2071166: Управляемый генератор импульсов: С1. 6 Н03К 3/03. № 4892554/09: опубл. 27.12.1996. Бюл. №36 / А.М. Сасов [3].
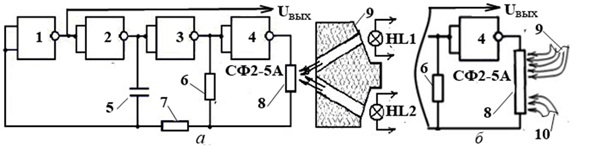
Рис. 2. Схема управляемого генератора импульсов
а - с коллиматором; б – с волоконно-оптическим коллектором
Схема реализована с использованием микросхемы из четырех логических элементов И-НЕ (рис.3а – поз. 1 – 4), фоторезистора СФ2-5А и двух сверхминиатюрных ламп накаливания марки СМН-6-20-1, размещенных в двухканальном коллиматоре 9. Работа управляемого генератора импульсов происходит следующим образом.
Под действием перезаряда конденсатора 5 происходит изменение потенциала на входе инвертора 1, который при достижении порога срабатывания переключается. Его переключение вызывает смену состояний инверторов 2, 3, 4 и перезаряд конденсатора, в результате чего возникает режим генерации. Частота генерации импульсов определяется параметрами времязадающей цепочки, состоящей из конденсатора 5, резисторов 6 и 7 и величиной сопротивления фоторезистора 8. Выбор рабочего участка диапазона частот выполняется с помощью излучателя света HL2. Управление частотой импульсов в выбранном диапазоне производится излучателем HL1. Регулировка режима работы генератора изменением тока ламп подсветки, обеспечивают высокую помехоустойчивость при дистанционном управлении частотой генерируемых импульсов.
Электрическая схема генератора, позволяет расширить его функциональные возможности. Статья Сасов А.М. Генераторы импульсов для многоканальных систем управления. Известия Тульского государственного университета. Технические науки, № 9, 2022. С. 470 – 472. (ВАК, РИНЦ) [4].
Вместо коллиматора используют волоконно-оптический коллектор (ВОК), рис. 3б. Он представляет собой волоконно-оптический жгут с одним входным торцом и несколькими выходными гибкими жгутами. Жгут имеет регулярную укладку световодов. Диаметр оболочки световода – 25 мкм. Входной торец ВОК устанавливают на окне фоторезистора СФ2-5А. Его фоточувствительный элемент имеет прямоугольную форму с размерами 1мм×5,8мм. Практически, на этой поверхности можно поместить входной торец в виде матрицы, состоящей из 6000 световодов. Такое количество световодов позволяет сформировать большое количество гибких жгутов. Через входные торцы гибких жгутов 9, рис 3б, управляющие объекты засвечивают фоторезистор, обеспечивая управление частотой генерируемых импульсов. Через входные торцы гибких жгутов 10, осуществляется выбор рабочего участка диапазона частот. Так происходит многоканальное управление режимом работы генератора.
Количество световодов, из которых компонуют ячейки матрицы ВОК, определяется интенсивностью световых потоков и длиной волны света управляющих объектов. Для ИК излучения ячейку следует делать большего профиля, для УФ излучения небольшого сечения. Использование источников света с различной длины волны способствует расширению областей применения управляемого генератора.
Дальнейшим развитием управляемых генераторов импульсов с многоканальным управлением частотой стал генератор: Патент RU № 2715547: Управляемый генератор импульсов: С1. МПК Н03К 3/00. № 2019139568: опубл. 28.02.2020. Бюл. №7 / А.М. Сасов [5].
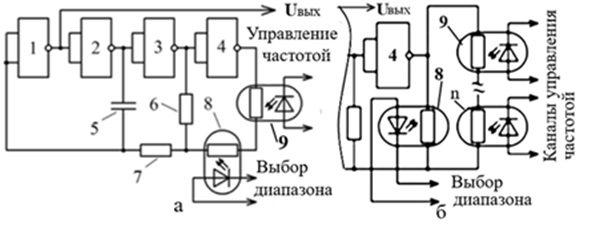
Рис.3. Схема генератора с оптронами
Работа управляемого генератора импульсов происходит следующим образом. Под действием перезаряда конденсатора 5 изменяется потенциал на входе инвертора 1, который при достижении порога срабатывания переключается. Переключение инвертора 1 вызывает смену состояний инверторов 2, 3, 4 и перезаряд конденсатора 5, в результате чего возникает режим генерации. Частота генерации определяется параметрами RC-цепи, состоящей из конденсатора 5, резисторов 6 и 7 и величиной сопротивления двух последовательно соединенных фоторезисторов оптопар 8- 9. Выбор рабочего участка диапазона частот производят с помощью оптопары 8. Осуществляют это путем изменения мощности светового потока, излучаемого ее светодиодом, который подключен к устройству выбора диапазона частот.
При этом расширение выбора диапазонов частот происходит вследствие того, что полностью используется весь интервал омического сопротивления фоторезистора. От минимального сопротивления, при максимальной мощности светового потока, до максимального сопротивления, при минимальной освещенности. Управление частотой генерируемых импульсов в выбранном диапазоне производится оптопарой 9. Осуществляют это путем изменения мощности светового потока, излучаемого ее светодиодом, который подключен к объекту управления частотой генерируемых импульсов.
На базе генератора с оптронами разработан генератор, управление частотой генерируемых импульсов которого, можно производить одновременно по двум трем или более каналам управления, гальванически развязанных и независимых между собой, в выбранном диапазоне частот, рис. 4б.
Генератор работает следующим образом. Перезаряд конденсатора 5 изменяет потенциал на входе инвертора 1, который при достижении порога срабатывания переключается. Переключение инвертора 1 вызывает смену состояний инверторов 2, 3, 4 и очередной перезаряд конденсатора 5, в результате чего возникает режим генерации.
Частоту генерации задают параметрами RC-цепи. Она состоит из конденсатора 5, резисторов 6 и 7 и результирующего сопротивления цепочки резисторов, составленной из двух или более последовательно соединенных фоторезисторов оптронов каналов управления частотой 9 – n и параллельно подключенного к ним фоторезистора оптрона, выбора диапазона частот 8. Выбор рабочего участка диапазона частот производят с помощью оптопары 9. Таким образом, предлагаемый управляемый генератор импульсов позволяет осуществлять одновременное и независимое между каналами управление частотой генерируемых импульсов двумя, тремя или более гальванически развязанных каналов в выбранном диапазоне частот.
В результате дальнейшей работы, были найдены оригинальные конструктивные решения расходомеров сыпучих материалов: Патент RU: № 2117254: Расходомер Сасова: С1. 6 G01F 3/26. № 93040364/28: опубл. 10.08.1998. Бюл. № 22 / А.М. Сасов [6].
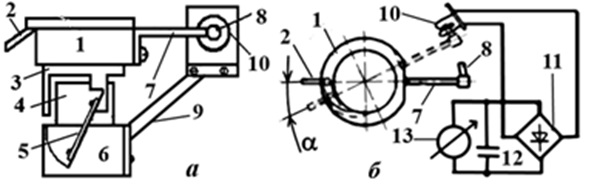
Рис. 4. Магнитоэлектрический расходомер сыпучих материалов.
Типовое ВБЗУ, рис.1 а, содержит бункер 1 с однозаходным спиральным лотком и расходным патрубком 2. Якорь 3, удерживается над электромагнитом 4 при помощи трех смещенных относительно друг друга на 120° пружин 5, закрепленных на основании 6. Для этого типа ВБЗУ нами разработана серия расходомеров сыпучих материалов. На рис. 5,
приведена схема магнитоэлектрического расходомера сыпучих материалов. Принцип его работы: на штанге 7, рис.1 а, в виде стержня, установлен постоянный магнит 8. На кронштейне 9 закреплена диэлектрическая плата с катушкой индуктивности 10. В момент отсутствия тока, через обмотку электромагнита 4, бункер 1 находится в состоянии покоя, и магнит 7 максимально удален от катушки 8, рис.1б.
В момент прохождения через обмотку электромагнита импульса тока, бункер поворачивается на угол α, магнит вводится в катушку индуктивности. Магнитное поле, пересекая витки катушки, наводит в них ЭДС. Чем больше амплитуда колебаний чашки, тем больше угол α и магнит глубже погружается в катушку, соответственно, большее число витков будет взаимодействовать с магнитным полем, больше будет ЭДС. В момент окончания импульса тока, бункер под воздействием пружин 5 возвращается в исходное положение. Величина измеряемого напряжения пропорциональна амплитуде колебаний чашки, поэтому служит показателем скорости расхода сыпучего материала. Расходомер обеспечивает визуальный контроль скорости истечения сыпучего материала из бункера и легко встраивается в системы автоматического управления. Рассмотренные конструкции расходомеров сыпучих материалов и управляемых генераторов импульсов, позволяют, в зависимости от свойств сыпучих материалов и особенностей технологических процессов их обработки,
В статье Сасов А. М. Система автоматического управления вибрационным бункерным загрузочным устройством. Известия Тульского государственного университета. Технические науки. № 7. Тула. Изд. ТулГу, 2019, С. 111.- 118 (ВАК, РИНЦ) [7], рассматриваются вопросы автоматизации вибрационных загрузочных устройств порошковых технологий.
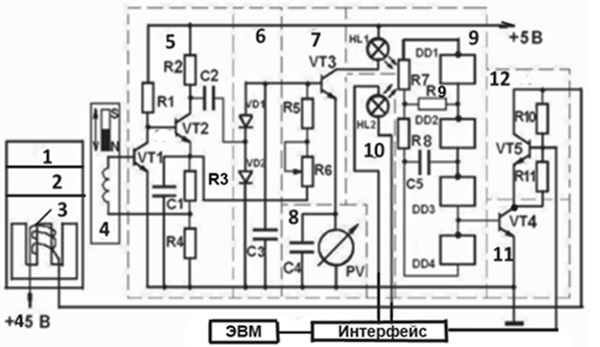
Рис. 5. Система автоматического управления ВБЗУ
Приведенная на рис. 5, схема автоматического управления ВБЗУ, представляет собой симбиоз генератора управляемых импульсов с коллиматором и магнитоэлектрического расходомера: Патент RU: Электровибрационное устройство: С1. № 2116143, 6 В06В 1/04. № 94021393/28: опубл. 27.07.1998. Бюл. № 21 / А.М. Сасов [8].
Электровибрационное устройство содержит бункер 1, якорь электромагнита 2, катушку электромагнита 3, электромагнитный датчик вибрации 4, усилитель 5, слаживающий фильтр 6, регулирующий элемента 7, индикатор резонанса 8. Управляемый генератор импульсов 9, собран на микросхеме DD - четыре логических элементов И-НЕ. Задатчик резонансной частоты 10 - НL2, коммутирующий элемент 11. Частота импульсов, вырабатываемых генератором, определяется элементами времязадающей ячейки. Она составлена из R9, R8, конденсатора С5 и R7 – фоторезистора СФ2-5. Его сопротивление изменяется в зависимости от суммарной интенсивности световых потоков от ламп накаливания HL1 и HL2.
Перед включением ВБЗУ колебательная система бункера, загруженного расходуемым сыпучим материалом, находится в покое. Поэтому на выходе датчика вибрации сигнал отсутствует. После подачи напряжения транзистор VT3 открывается, ток через лампу HL1 достигает максимального значения. Эта часть схемы преобразует амплитуду колебания бункера в световой поток, падающий на фоторезистор. Частота генерируемых импульсов определяется величинами R9, R6, R8, С5 и фоторезистора R7, сопротивление которого зависит от суммарной интенсивности световых потоков, излучаемых HL1 и HL2.
С выхода генератора импульсы через коммутирующий элемент VT4 и задатчик амплитуды VT5 поступают на катушку электромагнита 3 и возбуждают колебательную систему бункера. В результате на выходе вибродатчика появляется сигнал, который поступает на усилитель 5, затем преобразуется в постоянное напряжение сглаживающим фильтром 6 и поступает на вход управляющего элемента 7. Вследствие этого, ток через транзистор VT3 уменьшается, интенсивность свечения HL1 снижается, сопротивление фоторезистора R7 увеличивается, а частота импульсов на выходе генератора уменьшается. Так колебательная система бункера входит в режим резонанса.
По мере расхода сыпучего материала масса колеблющейся части ВБЗУ уменьшается, и частота его собственных колебаний сдвигается в сторону увеличения частоты, т.е. уходит от положения резонанса. В результате этого, амплитуда на выходе датчика вибрации уменьшается, ток через транзистор VT3 увеличивается, интенсивность свечения HL1 растет, сопротивление R7 уменьшается. Вследствие этого частота генерирующих импульсов увеличивается, подстраивая частоту вынужденных колебаний под частоту собственных колебаний, обеспечивая, тем самым, стабильность положения резонанса.
Выборка рабочей резонансной частоты, для каждой марки сыпучего материала, происходит за счет изменения тока лампы HL2. Амплитуда колебаний бункера работающего в режиме резонанса регулируется транзистором VT5. Необходимо отметить, что регулирование рабочей резонансной частоты бункера никак не связано с регулировкой амплитудой его колебаний. Управление этими эксплуатационными параметрами ВБЗУ осуществляется раздельно, через интерфейс по командам от ЭВМ. Так реализована система автоматического управления вибрационным бункерным загрузочным устройством.
Возможность варьировать компоновками расходомеров с управляемыми генераторами импульсов, позволяет создавать высокой производительности ВБЗУ, для каждого типа сыпучих материалов.
Системный подход к разработке технических средств автоматизации ВБЗУ, выявил направление их совершенствования.
1. Расходомеры для автоматизации бункерных загрузочных устройств. Известия Тульского государственного университета. Технические науки,
№ 10, 2020. – С. 483 – 488. (ВАК, РИНЦ)
2. Патент RU: № 2100782: Расходомер сыпучих материалов: С1. 6 G01F 3/12. № 93008843: опубл. 27.12.1997. Бюл. № 36 / А.М. Сасов.
3. Патент RU № 2071166: Управляемый генератор импульсов: С1. 6 Н03К 3/03.
№ 4892554/09: опубл. 27.12.1996. Бюл. №36 / А.М. Сасов.
4. Генераторы импульсов для многоканальных систем управления. Известия Тульского государственного университета. Технические науки, № 9, 2022. С. 470 – 472. (ВАК, РИНЦ).
5. Патент RU № 2715547: Управляемый генератор импульсов: С1. МПК Н03К 3/00.
№ 2019139568: опубл. 28.02.2020. Бюл. №7 / А.М. Сасов.
6. Патент RU: № 2117254: Расходомер Сасова: С1. 6 G01F 3/26. № 93040364/28: опубл. 10.08.1998. Бюл. № 22 / А.М. Сасов.
7. Система автоматического управления вибрационным бункерным загрузочным устройством. Известия Тульского государственного университета. Технические науки. Вып. 7. Тула. Изд. ТулГу, 2019, С. 111.- 118. (ВАК, РИНЦ).
8. Патент RU: Электровибрационное устройство: С1. № 2116143, 6 В06В 1/04. № 94021393/28: опубл. 27.07.1998. Бюл. № 21 / А.М. Сасов.
Руководитель темы Леонов Анатолий Петрович, кандидат технических наук, ученое звание доцент, доцент кафедры автоматизации технологических процессов и производств
Сервоприводы переменного тока с частотным управлением, обеспечивающие недостижимые ранее показатели качества управления различными объектами, являются базовой частью современного прецизионного автоматизированного оборудования. Они являются сложными техническими устройствами, дальнейшее совершенствование которых идет в направлении повышения их интеллектуальности и универсальности.
Под термином «сервопривод» будем понимать такой класс электроприводов, которые характеризуются самыми высокими техническими показателями и в наибольшей степени соответствуют самым жестким требованиям по качеству управления движением и точности перемещения рабочих органов машин и технологических установок (точностью и стабильностью отработки заданий), а также высокими значениями своих динамических показателей, характеризуемых значениями частоты пропускания их контуров управления. В основе современных приводных систем лежат интегрированные знания из таких ранее обособленных областей, как прецизионная электромеханика, силовая электроника, измерительная техника, цифровое управление, информационные технологии, микроэлектроника.
Развитие и дальнейшее совершенствование приводных систем идет по пути повышения степени их интеллектуальности и универсальности.
Интеллектуальность придает приводу большую гибкость и позволяет наряду с традиционными задачами контроля и управления осуществлять также диагностику, решать задачу прогнозирования технического состояния приводного устройства или, например, при необходимости управлять работой привода при помощи внешнего контроллера.
Универсализация является одним из ключевых моментов, который дает инженерам возможность применять сервопривод в широком спектре оборудования, включая научные исследования, промышленность, транспорт и другие сферы деятельности.
При автоматизации технологических процессов и производств имеют место четыре тенденции:
1. Применение в электроприводах автоматизированных систем двигателей переменного тока с векторным управлением, обеспечивающим при использовании трехконтурных систем подчиненного регулирования и реализации цифровых ПИД- алгоритмов:
• диапазон регулирования скорости более 1:1500;
• пусковой момент 200% от номинального;
• регулирование момента в четырех квадрантах в двигательном и генераторном (тормозном) режимах;
• хорошую реакцию на ударные нагрузки.
2. Передача большего количества функций от механических узлов к интеллектуальным (электронным, процессорным, информационным), из которых состоит система управления сервоприводом.
Такой подход значительно расширяет функциональные возможности привода, поскольку интеллектуальные модули легко перепрограммируются под новые задания и алгоритмы.
3. Возможность синхронизации большой группы сервоприводов с использованием промышленного коммуникационного оборудования, (например, до 128 приводов на базе промышленной шины CAN).
4. Объединение в единое конструктивное целое узлов сервопривода разной физической природы: механических, электрических, электромеханических, электронных, информационных. Создание на базе сервоприводов переменного тока интеллектуальных мехатронных модулей (ИММ) движения.
Постоянное развитие и совершенствование сервоприводов переменного тока с частотным управлением делает актуальной задачу исследования их функциональных возможностей при автоматизации технологических процессов и производств.
По результатам выполненных исследований опубликованы следующие материалы:
1. Системы управления оборудованием в автоматизированном производстве: учебное пособие / А.А. Евсиков, В.А. Коковин, А.П. Леонов. – Дубна: Гос. ун-т «Дубна», 2018. — 139 [1] с.
https://uni-protvino.ru/images/publications/ump_atp/atp_em_29.pdf
2. Об использовании системы моделирования VisSim для исследования электропривода, работающего при скалярном управлении в повторно-кратковременном номинальном режиме с частыми пусками и электрическим торможением / А.А. Евсиков, А.П. Леонов // Известия Института инженерной физики, №1 (51), 2019. — С. 42-48. (ВАК, РИНЦ).
https://uni-protvino.ru/images/publications/pps_atpip/atpip_s_256.pdf
3. Автоматизированный электропривод с частотным управлением: учебное пособие / А.А. Евсиков, В.А. Коковин, А.П. Леонов. – Дубна: Гос. ун-т «Дубна», 2020. – 121 [1] с.
https://www.uni-protvino.ru/images/publications/ump_atp/atp_em_14.pdf
4. Об особенностях структуры и настройки отечественных сервоприводов с векторным управлением / А.А. Евсиков, В.А. Коковин, А.П. Леонов // Фундаментальные и прикладные проблемы техники и технологии, №3 (341), 2020. С. 122-130, DOI: 10.33979/2073-7408-2020-341-3-122-130; (ВАК, РИНЦ)
https://elibrary.ru/item.asp?id=43034379
5. Об использовании функциональных возможностей сервоприводов с векторным управлением / А.А. Евсиков, В.А. Коковин, А.П. Леонов // Направлена в 2024 г. в редакцию журнала «Фундаментальные и прикладные проблемы техники и технологии», (ВАК, РИНЦ).
Руководитель темы Масликов Александр Альбертович, кандидат физико-математических наук, доцент кафедры общеобразовательных дисциплин, заместитель директора по учебной и научной работе.
Выполнение множественных сравнений совершенно необходимо при математико-статистической обработке проведенных исследований в самых разных областях науки и техники. При этом ставится задача установить статистически значимые различия между несколькими выборками, либо их отсутствие. Известный t-критерий Стьюдента (Госсета) разработанный для сравнения пар выборок нуждается в модификации при количестве выборок более двух и от этого резко теряет в мощности. Для этого критерия приходится вводить так называемую поправку Бонферони. При проверке статистических гипотез существует риск совершить ошибки двух видов - ошибки I-го рода, когда ошибочно отклоняется верная гипотеза и ошибки II -го рода, когда ошибочно принимается ложная гипотеза. Вероятность ошибки I-го рода называется уровнем значимости α, стандартом для него является значение 0,05. Поправка Бонферони заключается в том, что эффективно уровень значимости должен быть разделен на количество попарных сравнений, что приводит к значительной потери чувствительности критерия даже к значительным эффектам.
Вероятность ошибки II -го рода обозначают β. Ошибки I и II рода являются конкурирующими, уменьшение вероятности одной влечёт увеличение вероятности другой. Также полезной характеристикой является мощность критерия (1 – β). Чем больше мощность критерия, тем надёжнее он обнаруживает различия между выборками. Обычно считают приемлемой мощность порядка 0,8. Разумеется мощность зависит не только от объёма выборок (чем больше элементов в выборках, тем критерий оказывается мощнее), но и от величины эффекта, поэтому полезно иметь таблицы (или графики) для разных значений эффектов.
Мощнейшим методом пригодным для множественных сравнений является дисперсионный анализ (в англоязычной литературе ANOVA). Но, во-первых, этот метод определяет наличие различий по всей совокупности сравниваемых выборок, не указывая какие именно выборки различаются и во-вторых, аналитически доказана корректность процедуры дисперсионного анализа, только при условии нормальности распределений из которых производятся выборки (и гомогенности их дисперсий). Если не установлен факт нормальности, то в качестве альтернативы используют непараметрический ранговый критерий Крускала—Уоллиса с апостериорным тестом Данна, которые обладают значительно меньшей мощностью, поскольку работают не с числовыми значениями измерений, а с номерами из упорядоченного числового ряда.
Апостериорные тесты применяются после основного дисперсионного анализ или его непараметрического аналога и призваны указать – какие конкретно выборки различаются. После дисперсионного анализа в качестве пост-теста обычно используют тест Тьюки или его модификацию Ньюмена-Кейлса. Эти тесты считаются достаточно мощными, однако, как и ANOVA, строго доказаны только для нормальных и гомогенных выборок.
Мы решили экспериментально исследовать вопрос – насколько оправдан отказ от использования традиционных параметрических критериев, в случае, если критерий Шапиро-Уилка и тест Левене указывают на возможную ненормальность и/или негомогенность выборок.
Исследования проводятся экспериментально с помощью компьютерных симуляций, путём извлечения методом Монте-Карло выборок из искажённых ненормальных распределений. Использовались выборки сравнительно небольшого объёма (до 10 элементов), что характерно для некоторых дорогостоящих исследований, например, в фармакологии, социологии, лингвистике. Мы выдвигаем гипотезу о том, что использование традиционных параметрических критериев не приводит к катастрофическим последствиям. Это утверждение подкрепляется вычислением экспериментальных уровней значимости и мощностей, а также сравнением графиков, построенных на основе вычислений.
В качестве инструментария мы использовали программы, написанные в пакете Wolfram Mathematica (WM). Идея заключается в том, чтобы, следуя методу Монте-Карло, генерировать случайные выборки из различных распределений и применять к ним исследуемые тесты. В WM есть возможность подключить генератор псевдослучайных чисел “Mersenne Twister”, который и был использован в работе. Вихрь Мерсенна – это генератор сдвигового регистра обобщенной обратной связи с огромным периодом (219937 – 1), гарантирующим высочайшую степень случайности. Пакет WM позволяет формировать компактные программы для генерации большого числа случайных выборок из широкого набора библиотечных распределений.
Мы подвергли исследованию следующие искажённые распределения: t-распределение Стьюдента, χ2-распределение, распределение Джонсона, гамма-распределение, распределение Вейбулла. Рассматривались распределения как с сонаправленными, так и с разнонаправленными асимметриями. Приведём графики для мощностей некоторых распределений (см. рис 1.) Для получения каждой точки использовалось до 105 наборов симуляций четвёрок выборок. По горизонтали отложен шаг эффекта в единицах СКО, по вертикали – вероятность обнаружения эффекта. Как видно, все графики расположены весьма близко к графику для нормального распределения, что подтверждает возможность использования традиционных классических параметрических критериев и для искажённых выборок.

Рис. 1. – Мощность критерия Тьюки (Tukey HSD) для 10-ти элементных выборок.
Соответствие цветов графиков распределениям следующее: голубой – нормальное, оранжевый - Вейбулла, серый – Вейбулла с инверсией, жёлтый – гамма, синий – гамма с инверсией.
Кроме теоретических исследований с помощью метода Монте-Карло, также проводились математико-статистические расчёты для Центра Токсикологии (г.Большевик) и для лингвистов из ФГАОУ ВО «Российский университет дружбы народов имени Патриса Лумумбы», результаты были опубликованы в журналах «Мир Науки», «Известия ВГУ» (из списков ВАК, РИНЦ) и в сборниках университета «Дубна». 3 публикации сделаны в соавторстве с выпускниками филиала «Протвино».
За период 2020—2024 гг по описанным выше материалам защитили бакалаврские квалификационные работы 18 выпускников филиала «Протвино». Доклад студентки 3-го курса филиала по теме «Изучение поведения мощности стандартных критериев множественных сравнений на примере некоторых негауссовых выборок» представлен на конференцию "Молодёжь и инноватика" 6 февраля, 2025 (г. Серпухов).
1. Максимова О.Б., Масликов А.А., «Гендерные стереотипы как разновидность социальных стереотипов: функции в социальной коммуникации», Мир науки. Социология, филология, культурология. – 2021. – №3, Том 12. – URL: https://sfk-mn.ru/PDF/01SCSK321.pdf ЭЛ № ФС77-67275 от 21.09.2016, Роскомнадзор (ВАК, РИНЦ).
2. Алдобаев В.Н., Артемьева А.Д., Масликов А.А., «Исследование поведения классических критериев множественных сравнений, на ненормальных неоднородных распределениях, методом Монте-Карло», Вестник ВГУ. Серия: Системный анализ и информационные технологии. – 2021. – №3. – С. 72-80 (ВАК, ядро РИНЦ).
3. Алдобаев В.М., Артемьева А.Д., Масликов А.А., Саморокова В.И., «Изучение поведения критериев множественных сравнений на выборках из ненормальных и негомогенных распределений методом Монте-Карло (тезисы доклада)», Задачи и методы нейтронных исследований конденсированных сред: Вторая Всероссийская научно-практическая конференция (с международным участием) (Дубна, 21-23 ноября 2022 г.): сборник тезисов докладов / под. общ. ред. В.И. Боднарчука. – Дубна: Гос. ун-т «Дубна», 2022. – С. 23-24.
4. Максимова О.Б., Масликов А.А., «Лексическая интерференция и позитивный перенос при изучении английского языка в сфере профессиональной коммуникации как второго иностранного», Мир науки. Педагогика и психология. – 2022. – №1. – URL: https://mir-nauki.com/PDF/41PDMN122.pdf ЭЛ № ФС77-74663 от 24.12.2018, Роскомнадзор (ВАК, РИНЦ).
5. Максимова О.Б., Масликов А.А., «Межъязыковая интерференция у студентов мультилингов, изучающих английский язык как второй иностранный язык», Мир науки. Педагогика и психология». – 2022. – №5. – URL: https://mir-nauki.com/PDF/32PDMN522.pdf ЭЛ № ФС77-74663 от 24.12.2018, Роскомнадзор (ВАК, РИНЦ).
6. Максимова О.Б., Масликов А.А., «Межъязыковая интерференция при изучении английского языка в сфере профессиональной коммуникации как второго иностранного: пилотные исследования и математико-статистическая обработка результатов», Мир науки. Педагогика и психология. — 2023. — Т 11. — №2. — URL: https://mir-nauki.com/PDF/46PDMN223.pdf ЭЛ № ФС77-74663 от 24.12.2018, Роскомнадзор (ВАК, РИНЦ).
7. Алдобаев В.Н., Масликов А.А., Скворцова М.С., «Исследование мощности критериев множественных сравнений, применённых к выборкам с негауссовым распределением элементов», Сборник «Государственный университет «Дубна». 30 лет в науке», раздел «Естественные и инженерные науки», - 2024 - С. 233-240.
«Разработка и исследование интеллектуальных силовых преобразователей».
«Компьютерное моделирование физических процессов на этапах жизненного цикла электронных средств».
«Исследование сервоприводов переменного тока с частотным (скалярным и векторным) управлением».
Руководитель темы Коковин Валерий Аркадьевич, кандидат технических наук, ученое звание доцент, доцент кафедры автоматизации технологических процессов и производств, заведующий комплексной лабораторией филиала.
Исторически, сетевые взаимодействия в промышленных управляющих системах были организованы с использованием последовательных сетей полевого уровня RS-485 and RS-422. Протоколы на основе этих интерфейсов, такие как Modbus, Profibus и другие, были разработаны без учета безопасности, поскольку использовались для развертывания в средах с ограниченным доступом.
При организации киберзащиты систем контроля физического доступа (Physical Access Control System, PACS) к технологическим системам основное внимание уделяется проблеме предоставления или блокировке доступа.
Аппаратная безопасность передаваемых сообщений включает набор аппаратных средств, которые защищают конфиденциальность этих сообщений, know-how разработчиков и физическую безопасность оборудования. Кибератаки на разрушение промышленного оборудования чаще всего применяются на вычислительных устройствах и на коммуникационных сетях при организации межмашинных взаимодействий или Интернета вещей (IoT).
В настоящее время большинство PACS имеют в качестве коммуникационного интерфейса RS-485. Это связано в первую очередь с небольшими затратами на реализацию PACS. При этом устройства системы доступа могут подключаться последовательно и на большом расстоянии от основного сервера PACS. Это дает возможность без больших затрат добавлять дополнительные точки доступа к оборудованию. Во-вторых, переход к современным PACS на основе протокола TCP/IP требует значительных вложений и квалифицированный обслуживающий персонал.
В статье V. A. Kokovin, A. N. Sytin and V. V. Skvortsov, "Methods for Increasing the Cybersecurity of FNC Devices on the FPGA-Based Platform in Network Communications" [1] проанализирована опасность кибератак и их последствия с точки зрения критических уязвимостей технологических процессов, управляемых Функциональными Сетевыми Компонентами (Functional Networking Components, FNC). Рассмотрены особенности использования FNC в распределенных системах управления. Представлены алгоритмы формирования криптоидентификаторов для повышения кибербезопасности FNC при взаимодействии по локальным сетям. В качестве уникального идентификатора (Physically Unclonable Function, PUF) использовано значение времени прохождения сигнала через логические элементы ПЛИС, измеренного с помощью TDC7200. Разработана структура FNC с использованием семейства ПЛИС Cyclone 10 LP 10CL025YU256I7G, TDC7200 и контроллера Cortex-A72 ARM для формирования экспериментов по исследованию криптоидентификаторов. Представлены результаты экспериментов. Для увеличения киберзащиты при формировании сообщений использовался алгоритм сжатия данных без потерь [2].
В статье V. A. Kokovin, A. N. Sytin and V. V. Skvortsov "Hardware Cybersecurity on the FPGA Platform During Network Interaction of Distributed Industrial Equipment" [3] обоснована идея защиты данных, передаваемых по RS-485, путем замены отдельных, специально выделенных сегментов сети, имеющих неконтролируемый доступ (открытый для злоумышленника), на сегменты, которые защищены аппаратными средствами. Рассмотрена структурная организация защищенного сегмента сети (Protected Network Segment (PNS) и аппаратные ресурсы, необходимые для решения поставленной задачи.
Основным стандартом, определяющим идеологию PNS, является IEEE Standard 1355. Стандарт представляет собой коммуникационный последовательный интерфейс, предназначенный для соединения точка-точка, использующий среду передачи данных типа витая пара или оптоволокно. Выбор такой среды передачи сообщений определяется необходимой скоростью передачи информации. Способ передачи электрических сигналов в PNS регламентируется стандартом ANSI/TIA/EIA-644-A 2001. Этот стандарт определяет энергоэффективный и высокоскоростной способ передачи сигналов с помощью Low-Voltage Differential Signaling (LVDS). На сигнальном уровне используется DS-кодирование, которое требует две сигнальных линии: D – линия для передачи данных и S – линия для передачи строба (рис.1). DS-кодирование обладает свойством самосинхронизации, поскольку в комбинации DS-сигналов закодирован синхросигнал. Этот сигнал может восстанавливаться на приемной стороне логической операцией XOR над сигналами D и S. Самосинхронизация позволяет произвольно менять скорость передачи, даже в пределах одного сообщения. Это дает хорошее преимущество в безопасности. В интерфейсах RS-485 и RS-422 скорость фиксированная и выбирается из предложенного ряда.
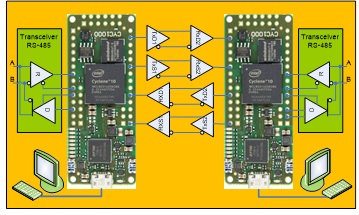
Рис.1. Функциональная схема и ресурсы для реализации PNS.
Использование в составе PNS элементов на платформе ПЛИС дает широкие функциональные возможности: использование сторонних IP-ядер с адаптацией к решаемой задаче, изменение алгоритма "на лету", меняя конфигурацию ПЛИС, и подстраиваясь к изменяющимся условиям работы системы. При проверке работоспособности PNS использовалась ПЛИС семейства Cyclone 10 LP 10CL025YU256C8G фирмы INTEL.
В статье V. A. Kokovin, A. A. Evsikov, A. N. Sytin, V. V. Skvortsov and S. U. Uvaysov, "Development and Research of a Hardware Security Module to Control and Protect Access to Industrial Equipment" [4] рассматриваются методы уменьшения киберугроз при сетевом взаимодействии промышленного оборудования и решение задач киберзащиты систем контроля физического доступа. Предполагается, что в составе управляющих и сетевых контуров оборудования используются решения на платформе ПЛИС. При организации киберзащиты систем контроля физического доступа к производственному оборудованию основное внимание уделяется проблеме предоставления или блокировке доступа. В этом случае реализуется сценарий авторизации лиц, которым разрешен доступ в определенное здание или зону, где находится оборудование. Большие производственные комплексы имеет географически и алгоритмически распределенное промышленное оборудование, что усложняет контроль доступа к оборудованию. Чаще всего для удаленной аутентификации персонала используется коммуникационный интерфейс RS-485.
Разработка тестовой версии Аппаратного Модуля Безопасности для Выделенных Сетевых Сегментов (Hardware Security Module for Dedicated Network Segments, HSM_DNS), представленная в данной статье, решает задачи киберзащиты отдельных неконтролируемых участков сети связи полевого уровня (RS-485, RS-422), физически доступных злоумышленникам. Киберугроза, называемая атакой типа «человек посередине» (MiTM), возникает для незащищенных сегментов сети. Атака направлена на нарушение контроля доступа, конфиденциальности и целостности данных отправителя в сети, что может привести к подмене вредоносных данных и выводу из строя промышленного оборудования. Для тестирования модуля HSM_DNS была разработана печатная плата в форм-факторе PC/104 (рис.2). В качестве аппаратной платформы управления выбрана программируемая вентильная матрица (ПЛИС). Выбор ПЛИС обоснован необходимостью работы HSM в режиме реального времени, кодируя передаваемые данные по разработанному алгоритму. Кроме того, использование ПЛИС позволяет реализовать нестандартный протокол передачи данных, что повышает защищенность устройства. В статье представлены результаты испытаний и их обсуждение.
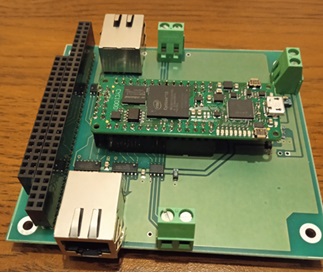
Рис.2. Общий вид тестовой версии HSM_DNS
Исследования разработанного модуля HSM_DNS показали, что решена задача замены отдельных, специально выделенных сегментов сети (RS-485, RS-422) с неконтролируемым доступом (открытых для злоумышленника) на сегменты, защищенные аппаратным шифрованием. Блок управления в ПЛИС анализирует направление передачи данных по RS-485 и настраивает работу блоков в ПЛИС либо на кодирование данных (поток из сети RS-485), либо на декодирование зашифрованного потока данных (поток из DS-Link). Все операции выполняются в режиме реального времени независимо от используемого протокола передачи данных (например, Profibus DP, ModBUS и т. д.) по сети RS-485. Разработка тестового проекта в пакете INTEL Quartus Prime 18.1 для ПЛИС (Cyclone 10 LP 10CL025YU256C8G) показала большой запас как по логическим элементам (используется менее 15%), так и по производительности (ПЛИС может работать на внутренней частоте 300 МГц). Кроме того, большой запас внутренней памяти (M9K, 256x36 блоков) позволяет гибко использовать различные массивы KeyArray [Address][Key], образы которых предварительно записаны в конфигурационную память мини-платы TEI0003-03.
Исследования модулей показали, что при разработке проекта можно использовать ПЛИС с меньшими ресурсами, а значит и более дешевую, либо добавить больше функциональности модулям HSM_DNS.
Разработка печатной платы модуля HSM_DNS в форм-факторе PC/104 позволяет использовать предлагаемое решение в промышленном оборудовании с жесткими условиями эксплуатации, такими как электромагнитные помехи и вибрации.
1. V. A. Kokovin, A. N. Sytin and V. V. Skvortsov, "Methods for Increasing the Cybersecurity of FNC Devices on the FPGA-Based Platform in Network Communications," 2022 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Sochi, Russian Federation, 2022, pp. 825-830, doi: 10.1109/ICIEAM54945.2022.9787121, https://ieeexplore.ieee.org/document/9787121
2. V. A. Kokovin, S. U. Uvaysov and S. S. Uvaysova, "Real-time sorting and lossless compression of data on FPGA," 2018 Moscow Workshop on Electronic and Networking Technologies (MWENT), Moscow, Russia, 2018, pp. 1-5, doi: 10.1109/MWENT.2018.8337187, https://ieeexplore.ieee.org/document/8337187#citations
3. V. A. Kokovin, A. N. Sytin and V. V. Skvortsov, "Hardware Cybersecurity on the FPGA Platform During Network Interaction of Distributed Industrial Equipment," 2024 International Russian Smart Industry Conference (SmartIndustryCon), Sochi, Russian Federation, 2024, pp. 568-573, doi: 10.1109/SmartIndustryCon61328.2024.10515711, https://ieeexplore.ieee.org/document/10515711
4. V. A. Kokovin, A. A. Evsikov, A. N. Sytin, V. V. Skvortsov and S. U. Uvaysov, "Development and Research of a Hardware Security Module to Control and Protect Access to Industrial Equipment," 2024 International Seminar on Electron Devices Design and Production (SED), Sochi, Russian Federation, 2024, pp. 1-5, doi: 10.1109/SED63331.2024.10741050, https://ieeexplore.ieee.org/document/10741050
